Diante da necessidade de montar uma minicentrífuga para uso em laboratório, procurei conhecer um pouco mais o funcionamento e o controle dos pequenos motores elétricos.
A idéia é aproveitar os motores comumente encontrados nos equipamentos de informática sucateados (drives de disquetes, drives de CD-ROM, HDs, impressoras etc) para aplicações em Automação em Laboratórios de Águas.
Nota
Este material não tem a pretensão de ser uma manual “completo” sobre motores elétricos! Mas apenas a compilação de algumas informações disponíveis na Internet visando ajudar os iniciantes que, como eu, ficam confusos quando começam a tomar contato com um assunto novo e fora da sua especialidade. Vou me concentrar em algumas informações práticas dos motores de Corrente Contínua (CC) ou Direct Current (DC), sem me aprofundar nos funtamentos teóricos.
Para quem quiser conhecer os fundamentos dos motores elétricos, recomendo os tutoriais do Prof. Newton C. Braga: Como funciona o motor elétrico (MEC060) e Como funciona o motor de corrente contínua (ART476)
Podemos identificar duas partes muito importantes nos motores elétricos: rotor (parte rotativa) e o estator (parte fixa do motor).
Os motores CC podem ser agrupados em 2 grandes grupos:
Motores de corrente contínua “COM” escovas.
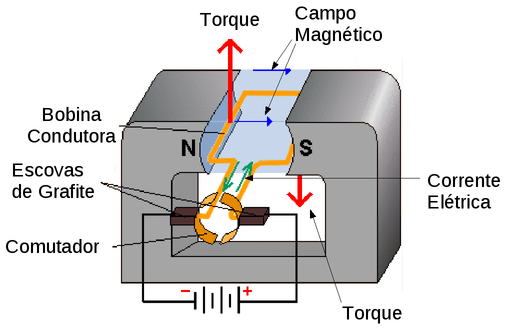
Nos motores com escovas, o rotor é formado por uma bobina na qual circula uma corrente contínua gerando um campo magnético cuja intensidade é proporcional à corrente. Quando o campo magnético do rotor tenta se alinhar com o campo magnético (fixo) do stator o comutador inverte o sentido da corrente, o que causa a inversão da polaridade do campo magnético do rotor e o reinício do ciclo de alinhamento dos campos magnéticos do rotor (variável) e do stator (fixo).
Figura K.1. Esquema de um motor CC “COM” escovas. (Fonte: http://copyleftscience.wikispaces.com/9.3.1+Motors
E motores de corrente contínua “SEM” escovas ou motores BLDC (Brushless DC).
Figura K.2. Funcionamento de um motor BLDC com o rotor interno e o stator na parte externa. (Fonte: http://www.speedy-bl.com/bldc.gif
Nos motores BLDC a energia elétrica é convertida em energia mecânica pelas forças de atração (e repulsão) magnética entre os magnetos permanentes do rotor e o campo magnético rotativo induzido pelas bobinas eletromagnéticas do stator.
Como não possuem escovas a comutação nos motores BLDC é feita eletrônicamente. As bobinas (eletroímãs) assumem o papel de stator e os magnetos (ímãs permanentes) funcionam como rotor girando no centro, ou em torno, do stator.
Um exemplo típico de motor BLDC é o motor das ventoinhas usadas para refrigerar os processadores e a fonte de alimentação dos computadores.
Figura K.3. Bobinas de um motor BLDC de uma ventoinha (cooler). (Fonte: http://www.howstuffworks.com/brushless-motor.htm

E a classe dos motores BLDC pode ainda ser dividida em Motor de Passo e Motor Spindle:
Motor de Passo. Para mais informações consulte os tutoriais: www.rogercom.com e http://labdegaragem.com
Figura K.4. Funcionamento típico de um motor de passo.(Fonte: http://www.rogercom.com/pparalela/IntroMotorPasso.htm

Motor Spindle. Tutorial: http://elabz.com
Figura K.5. A animação abaixo ilustra apenas 6 etapas do ciclo de funcionamento de um motor Spindle que utiliza 3 fios conectados em estrela para alimentar 9 bobinas. A animação completa está disponível no link http://elabz.com/brushless-dc-motor-with-arduino
A diferença básica entre os motores de passo e os motores spindle está na configuração do enrolamento das bobinas e no modo de operação, nos ciclos de alimentação, das bobinas.
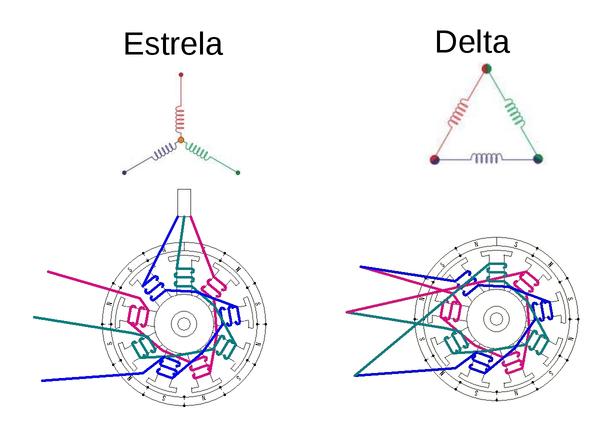
Nos motores spindle o enrolamento das bobinas pode ter uma configuração em estrela ou em delta, sendo mais comum o enrolamento em estrela.
Figura K.6. Configuração em estrela e em delta das bobinas de motores BLDC e o respectivo esquema de enrolamento em um típico motor de CD com 9 bobinas e 12 magnetos. (Adaptado de http://www.bavaria-direct.co.za/models/motor_info.htm
Na configuração em estrela com “3” fios a corrente flui através de “2” fios em cada etapa do ciclo de operação, conforme pode ser observado na figura seguinte.
Figura K.7. Etapas de operação de um motor BLDC com 3 fios em estrela. (Fonte: http://www.edn.com/design/sensors/4406682/Brushless-DC-Motors---Part-I--Construction-and-Operating-Principles)
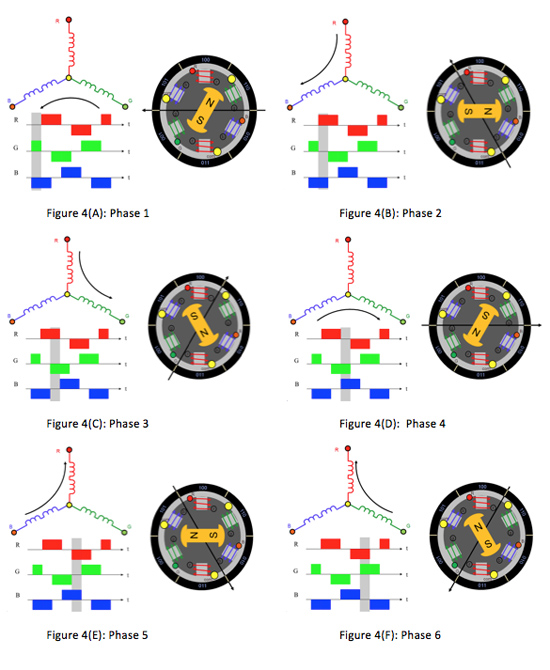
Conforme a figura acima, em cada etapa do ciclo de rotação completo a corrente flui entre um dos fios que é colocado em potencial mais elevado e o segundo fio que está em potencial mais baixo, enquanto o terceiro fio fica isolado sem corrente.
Em alguns casos encontram-se motores com uma configuração em estrela com 4 fios, onde “N” funciona como neutro (terra).
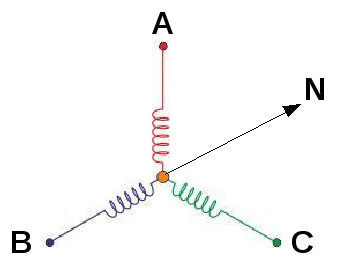
Na configuração em estrela com 4 fios a operação do motor é mais simples pois cada etapa utiliza o fio “N” como terra e alterna o potencial dos demais fios de forma que a corrente flui a partir de um dos fios (A ou B ou C), com maior potencial, para o fio “N”.
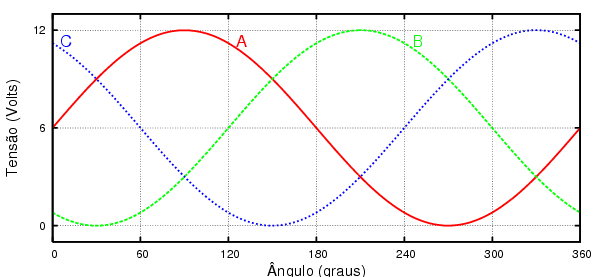
A forma ideal para controlar a velocidade dos motores spindle de 3 fases é a geração de pulsos “senoidais” de voltagem defasados em 120° conforme a figura abaixo.
Figura K.9. Gráfico da variação senoidal da voltagem em um motor spindle de 3 fases (fios), representando um ciclo. Cada ciclo representa 1/6 da rotação completa do motor. (Fonte: http://www.dm.ufscar.br/~waldeck/pic/ponte-h/sine-3.png)
Nota
Neste tutorial tentamos descrever o uso da placa Arduino em projetos para o controle de motores BLDC. E como os pinos analógicos da placa Arduino não geram uma saída analógica verdadeira, ou seja, valores intermediários “entre” 0 e 5 V, mas apenas valores “discretos”, ou seja, 0 V “ou” 5 V. Vamos descrever as estratégias utilizadas para o uso da placa Arduino nesse tipo de aplicação.
Para usar o Arduino no controle de motores BLDC, utiliza-se uma técnica chamada Modulação por Largura de Pulso (PWM) para “simular” a saída analógica desejada.
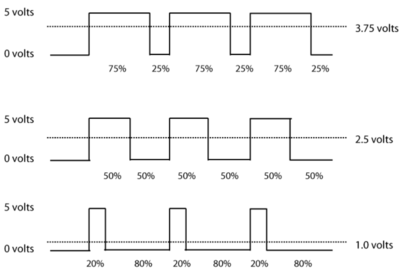
Na técnica PWM são gerados ciclos com frequência da ordem de 500 Hz durante os quais parte do tempo o pino de saída assume o valor alto (5V) e no restante do ciclo passa para baixa voltagem (0V).
A razão entre o tempo de duração do potencial alto pelo (5V) pela duração de cada ciclo é chamada de razão cíclica ou duty cycle em inglês.(Fonte: Wikipedia)
Por exemplo, para simular uma saída de 2,5V o pino de saída permanece 50% do tempo com 5V e 50% com 0V. Para gerar um sinal “equivalente” a 3,75V o pino de saída permanece 75% do tempo com 5V e 25% com 0V, conforme ilustrado na figura seguinte.
Figura K.10. Sinais de saída dos pinos PWM do Arduino com o uso da técnica PWM com razões cíclicas de 75%, 50% e 20%. (Programming Interactivity, 2009)
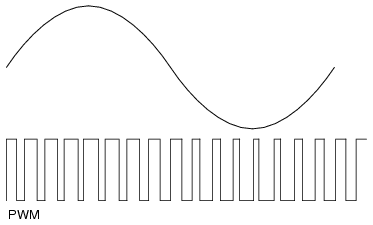
Quando se utiliza PWM para simular uma saída de voltagem com uma variação “senoidal” a razão cíclica varia continuamente ao longo do tempo conforme a figura abaixo.
Figura K.11. Uso de PWM para simular uma saída de voltagem com uma variação “senoidal”. (Fonte: http://electronics.stackexchange.com/questions/43105/control-differences-between-ac-induction-motor-and-brushless-dc-motor)
Nota
A PWM é uma estratégia de “baixo custo” para simular saídas analógicas com o uso de microcontroladores.
Um dos projetos mais didáticos, que eu encontrei, está disponível no link http://elabz.com/brushless-dc-motor-with-arduino.
Este projeto descreve o controle de um motor de CD/DVD com um estator (interno) com 9 bobinas e um rotor (externo) com 12 magnetos permanentes.
O circuito é formado pelo CI SN754410 que consiste em uma Ponte H montada em um circuito integrado. (Datasheet do SN754410 - Fonte www.ti.com/lit/ds/symlink/sn754410.pdf)
Uma Ponte H é um circuito eletrônico que permite aplicar uma voltagem em um motor em ambas as direções, controlando o sentido de rotação de um motor (CC).
Existem pontes H montadas na forma de um Circuito Integrado (CI) mas também podem ser montadas com o uso de componentes discretos.
O site http://www.pyroelectro.com/tutorials/sn754410_dual_motor_control/theory.html ilustra de maneira didática o funcionamento dos pinos do CI SN754410.
E a figura seguinte mostra o diagrama do circuito com a Ponte H SN754410.
Figura K.12. Diagrama do circuito para controle de motor BLDC de CD-ROM com uma Ponte H SN754410.(Fonte: http://elabz.com/bldc-motor-with-arduino-circuit-and-software/)
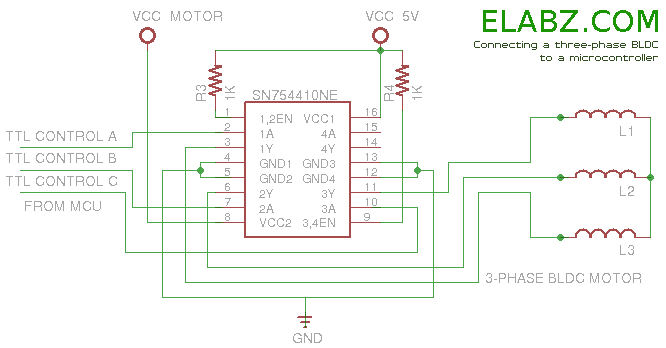
A ponte H permite basicamente fornecer e drenar corrente dos três fios que alimentam as bobinas do motor.
Outros projetos usando a Ponte H L293D e L293NE: