A vazão de um fluido pode ser definida como o volume (vazão volumétrica) ou a massa (vazão gravimétrica) de um fluido que escoa através de um duto por unidade de tempo.
Vazão volumétrica (QV) = Volume (V) / Tempo (t)
Vazão gravimétrica (QM) = Massa (M) / Tempo (t)
No caso da água, como a densidade é ~1 g/ml (0,99707 g/ml a 25 C) QV ≌ QM
Para saber mais sobre as tecnologias para medidas de vazão ver Flow measurement.
Para automatizar o monitoramento da vazão de água em residências é possivel usar hidrômetros comerciais com saída de sinal. Alguns modelos comerciais instalam um pequeno ímã no ponteiro que marca o volume em litros e uma ampola de contato (reed switch) gera pulsos que podem ser monitorados por uma entrada digital da placa Arduino. Alguns produtos comerciais:
Segundo o manual, esses hidrômetros são capazes de medir vazões a partir de 0,25-0,5 L/min.
Para uso em montagens com pequenas dimensões existem outras opções:
No AliExpress você encontra alguns modelos: 1/2", 1/4" e 1/8".
Na Brasilrobotics: 3/4", 1/2" e 1/4".
E no Laboratório de Garagem: 3/4" e tutorial.
E algumas dicas de programação: https://davebmiller.wordpress.com/2011/01/18/arduino-flowmeter/.
Mas a “sensibilidade” desses medidores para pequenas vazões (de 0,3 a 1,0 L/min dependendo do modelo) não é muito diferente da sensibilidade dos hidrômetros residenciais.
A empresa Atlas Scientific fornece o modelo SEN-203F com sensibilidade de 0,37 ml a cada pulso, mas não é barato!
Pesquisando por alternativas DIY encontrei: http://www.builditsolar.com/References/Measurements/DIYFlowMeter.htm e http://www.instructables.com/id/Flow-Meter/.
Em algumas situações é necessário medir vazões da ordem de algums poucos ml/min, e nesse caso uma possível alternativa é medir a vazão gravimétrica com o uso de uma balança ou um transdutor resistivo de força.
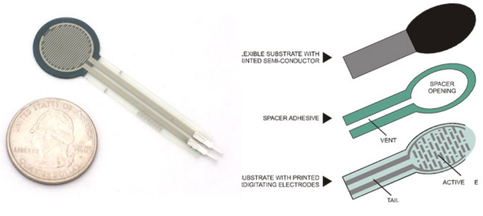
Um transdutor resistivo de força (FSR - Force Sensing Resistor) se baseia no uso da resistência elétrica para medir a força (ou pressão) aplicada sobre o transdutor (ou sensor). O dispositivo é formado por um material resistivo aplicado sobre um filme inferior, e no filme superior é aplicado um conjunto de contatos interdigitais. O material resistivo e os contatos interdigitais ficam separados por um espaçador localizado nas bordas. Com a aplicação de uma força sobre o transdutor ocorre uma aproximação dos contatos com o material resistivo e consequente aumento da condutividade “proporcional” à força aplicada.
Figura 44. Diagrama simplificado de um Transdutor Resistivo de Força (Fonte: https://ccrma.stanford.edu/CCRMA/Courses/252/sensors/node8.html).
Figura 45. Modelo comercial de um Transdutor Resistivo de Força (Fonte: http://www.ladyada.net/wiki/tutorials/learn/sensors/fsr.html).
Alguns modelos disponíveis no AliExpress, Multilógica, Robocore e Laboratório de Garagem.
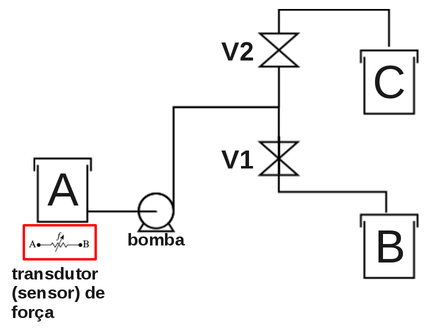
Para utilizar um transdutor de força para medir vazão podemos, por exemplo, adaptar um transdutor para monitor a variação da massa (força peso) de um reservatório com entrada ou saída de água, conforme o diagrama seguinte.
Figura 46. Diagrama simplificado de um sistema contendo bomba, válvulas de comutação e detector de vazão gravimétrica. A vazão gravimétrica é medida com auxílio de um transdutor (sensor) de força monitorando a variação de massa do reservatório A.
Os teste com SRF indicaram que este sensor não é adequado para medidas de vazão gravimétrica, pois a resposta não é linear e a sensibilidade é baixa.
Posteriormente passamos a usar uma célula de carga (Hackeando uma Balança Digital) e usamos esse tipo de sensor no projeto do Irrigador com Balança.